I am on a robotics team!
I am on an FRC robotics team, where a group of students design, build, and code a robot in very small time constraints to compete in a game. As lead programmer for my team I've written code for odometry, machine learning, and swerve drive algorithms. We've recently won our district championship, and my code won the autonomous and innovation in control awards at the world championship.
Click here for code!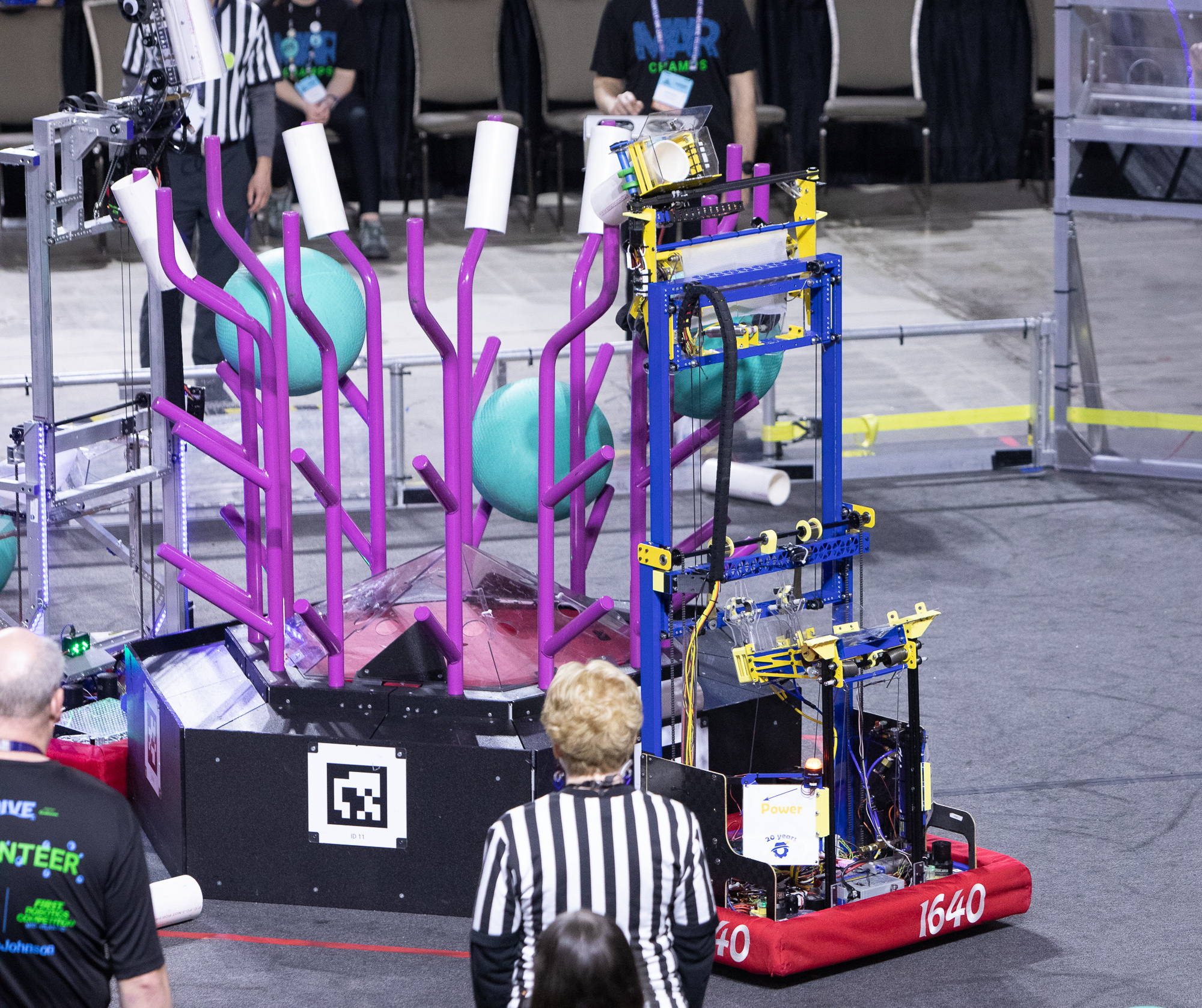
I've led the design and code for multiple game jams!
A game jam is a competition in which one must make a video game in an extremely short amount of time, either solo or as a team. I work in a team of 4. I have participated in 48, 72, and 96 hour jams. Placed in 74th place in enjoyment out of 9,649 entries in most recent game jam. Click here for code.Click here for game downloads!
Custom tools for game development in Godot

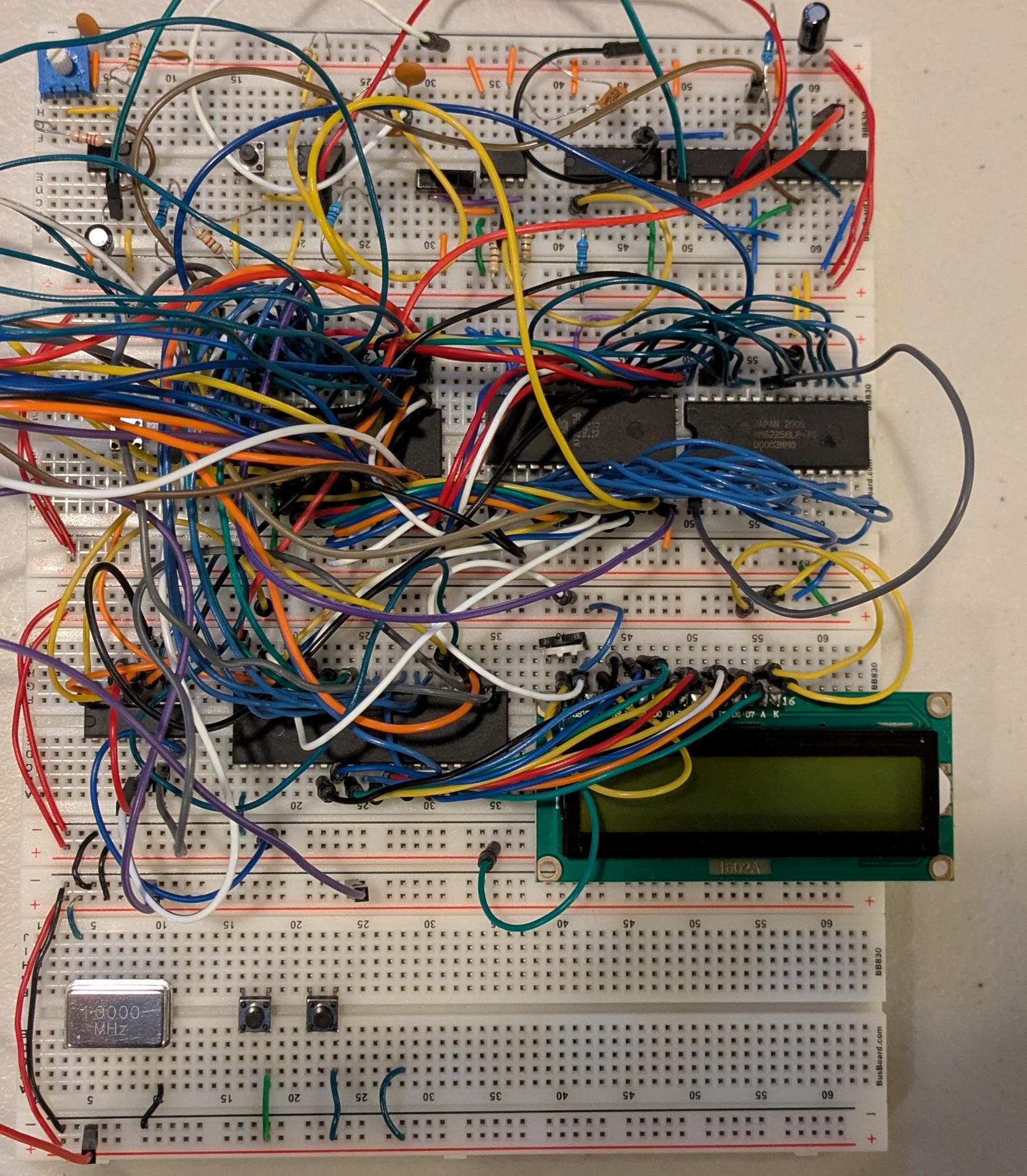
I've built a custom breadboard computer!
It is using the 6502 microprocessor. I've implemented RAM, a character LCD, I/O, and interrupts. I am following Ben Eater's design, with some modifications to hardware (for example improved interrupt hardware) and custom assembly software. Currently, it is running code that computes the fibonacci sequence.
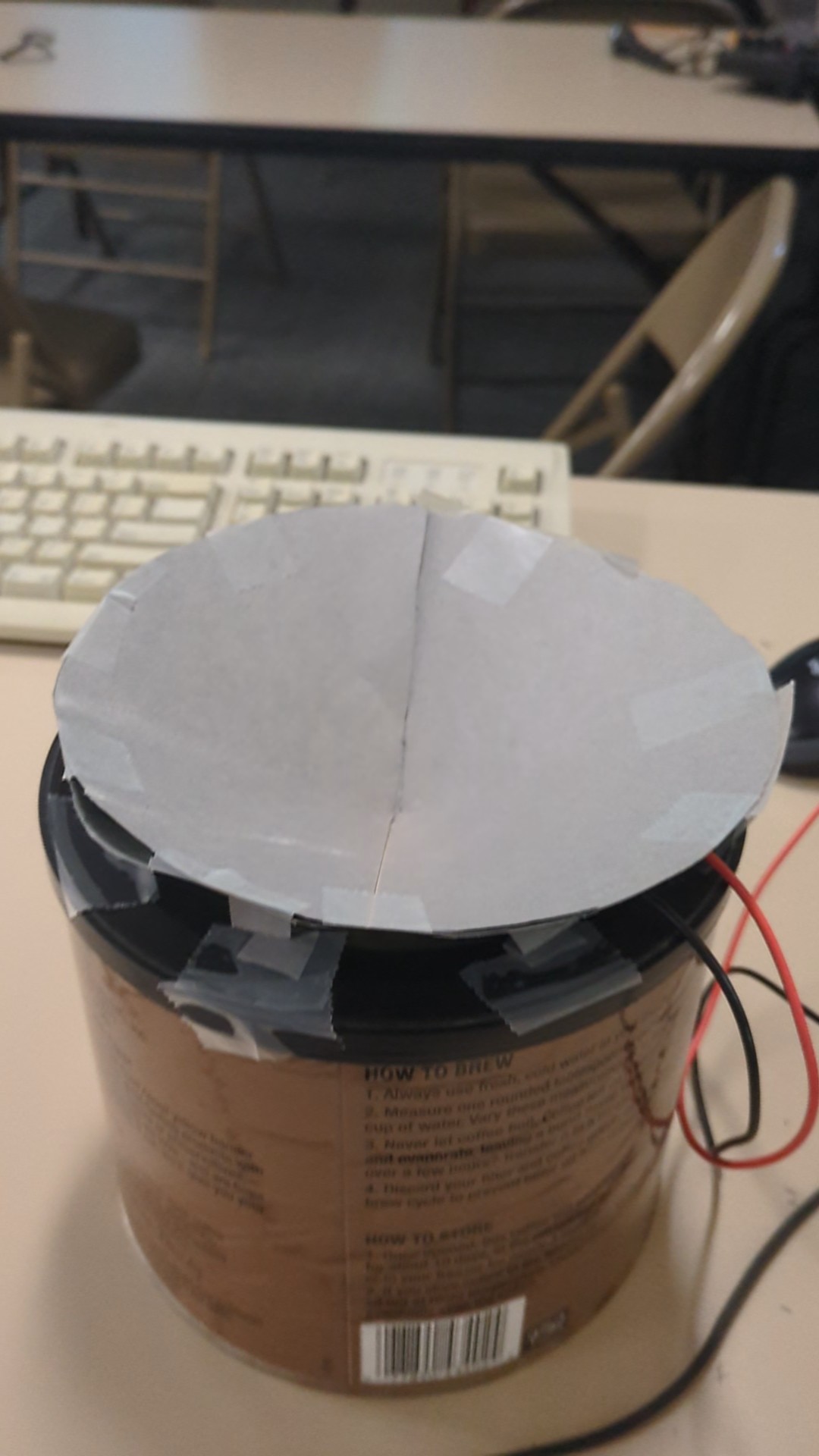
I've made a custom speaker!
The speaker was built entirely from scratch, following no guides and with no external resources. All
materials were things I found around the house. For example, the copper coil for the electromagnet was
taken from an electric toothbrush. I am proud of this project for being able to constantly improve on
previous iterations of the design, not for its technical difficulty.

I have made a GLSL shader which can render an arg plot of most complex valued functions, a general fractal renderer that can take any function of z and c (for example the classic z^2 + C) and render at high speed at great zoom depths.
Click here for code!

Mail me at [email protected].
Click here for the code for this website.
Click here for my github.
This page uses Google Analytics.